worknc2017r2是由Sescoi公司出品的一款从2轴到5轴的自动化刀具路径生成软件。它可以以先进的并行处理器的下一个档次是极度并行provrssing。如果你有硬件支持多达24个核心,那么这是你的工具。的extremem并行处理是一个购买选项,允许用户计算达16刀具路径在每一次工作区。软件包括流行的中性文件格式,如IGES和STL,本地的CAD文件,WorkNC的直接
翻译,可以用来打开那些文件。WorkNC的直接翻译的不断发展提供性能和可靠性的最佳水平时,打开本地CAD文件。WorkNC的直接翻译是不断更新以保持目前的变化对本地文件格式。本站提供
worknc2017破解版下载
破解教程
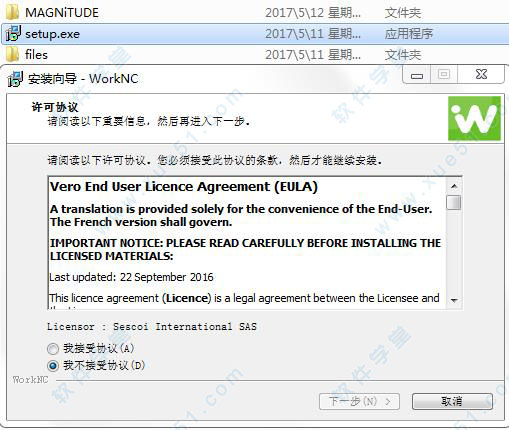
1、运行setup.exe启动软件安装程序并且完成软件安装
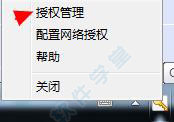
2、软件安装好之后,在任务栏中找到“CLS 2017”,右键单击选择“授权管理”
3、选择“单机授权”,再点击“安装授权”
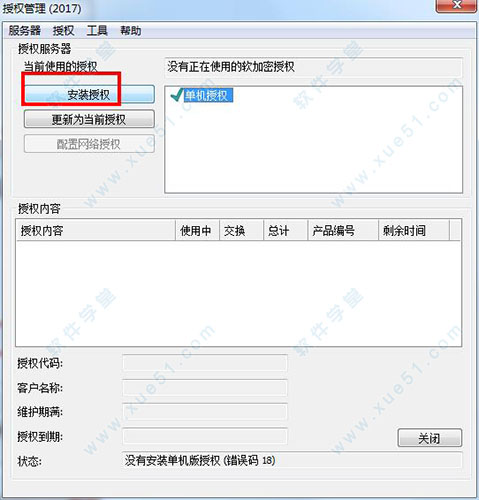
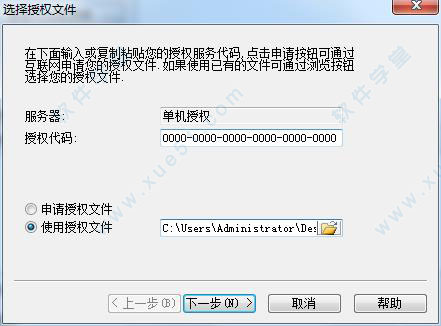
4、在弹出来的窗口选择选择“使用授权文件”,在浏览本地文件,选择下载文件夹中的“MAGNiTUDE”文件夹中的内容即可
功能介绍
1、强大的素描
WorkNC的设计师的草图功能允许使用自由格式输入二维图形的创建。虽然用户可以依靠传统的基于坐标的输入方法,自由画草图与周围的几何智能交互。这种能力能够直观地创建隐含的限制与其他几何加速的写生创作过程的同时保持最大的灵活性,为未来的变化。
2、几何加工
WorkNC的设计师提供了一个主机的一些关键的机械模型制备几何创建技术。孔封盖是简单和容易使用WorkNC的设计师,有助于保证表面加工提供最佳的可能结果的特征的一个很好的例子。这个功能可以用来把任何东西从一个简单的钻孔到一个复杂的开放腔,只要轻点几下鼠标就可以了。曲线创建例程范围广泛,大大提高了边界的创作,简单但功能强大的曲面创建技术提供更多的权力比以前的机械师。
3、处理二维数据
WorkNC的设计器支持导入DXF和DWG文件允许用户简单地重复使用进口型材从原始数据中存在的二维数据转换成3D模型。导入的数据自动创建草图配置区域,使得从2D到3D的转换比以往任何时候都容易。
4、CAD接口的广泛范围
WorkNC的设计师进口数据从各种各样的交换格式包括Parasolid,IGES,DXF,DWG,ACIS,STL和VDA文件以及从CAD系统的本地数据:
*CATIA V4和V5
*Pro/ENGINEER与PTC的Creo
*Autodesk Inventor
*西门子NX
*SolidWorks
*Solid Edge
广泛的翻译人员确保用户可以使用来自几乎所有供应商的数据。非常大的文件可以轻松处理,使用复杂设计的公司将受益于客户的CAD数据可以被操纵的简单性。
软件特点
1、易于使用
WorkNC的机器人的图形用户界面提供了简单、快速和精确的规划导致复杂的刀具路径生成所有类型的材料和机器。这个简单的程序使得制造商能够实现机器人的全部潜力。
所有的WorkNC的策略(3, 3 + 2或5轴联动)可以用来实现各种制造业的工作岗位如研磨,切割,等,在车间现有的设备。
WorkNC的机器人取代点对于部分微调学习周期点。
2、目标明确
今天,除了铣削应用在其他领域解决方案的提供,WorkNC。
冲压模具边缘硬化由WorkNC的允许这个过程,经常手动完成,需要自动化和飞行员的激光头安装在数控铣床或机器人。
WorkNC的机器人产生的轨迹复杂的几何形式(STL网格和NURBS曲面)可个性化激光或焊枪。
3、全真模拟
“复杂”的机器人的运动需要一个精确的机器人单元的CAD模型,以检测最终碰撞不同的元素如机器人之间,换刀的杂志,桌子或其他支持,辅助轴和安全屏障。
4、奇异轨迹优化
轨迹可以引起机器人手腕和手臂的奇异性问题。WorkNC的机器人可以自动检测潜在的奇异轨迹的条件和警告运营商使他们能够采取适当的行动。
里面的机器人应用程序允许机器人运动优化仿真。该模块提供了机器人的构型或互补的位置确保优化轨迹。
高的轨迹精度保证最优质的产品。
5、不同的细胞过程或配置
(1)工具安装机器人
工具安装机器人的电池配置允许加工或各种过程在非常大的零件和重型零件的应用。
这个过程提供了对机器人在换刀采用杂志更换工具或加工设备的可能性。一些工具可以同时安装在机器人的头部。
(2)部分安装机器人
这种类型的解决方案提出了串行生产用途的机器人能力有限的小部分。
这个过程可以自动化的细胞是从装坯在输送带完成加工和配售部分回到传送带控制。
6、运动学
WorkNC的机器人可以驾驶任何类型的机器人从4轴到7轴以及辅助轴如旋转表、轨道式机器人,具有3个直线轴力,等等。
WorkNC的机器人提供图书馆250 +现有的机器,从超过22的供应。
7、机器人的种类
WorkNC的机器人可以适应各种品牌的机器人。
WorkNC的机器人后,可根据生产设施,创建程序,飞行员所有类型的考虑所有可能的参数,由于特定的模拟器献给每个控制器的机器人
点击星星用来评分