PhotoScan Pro是一款基于视频影像可以自动生成高质量三维模型的3D
建模软件,可以根据数码照片,将2D图片转换为3D模型的三维重组软件。它基于最新的多视点三维重建技术,具有任意图像的运算能力,在受控和不受控制的条件下都是高效的,提供完全自动化的工作流程,即使是非专业人员也可以在一台电脑上处理成百上千张航空影像,生成专业级别的摄影测量数据。软件本身对于航摄照片和高分辨率数码相机拍摄的影像都可以进行兼容性的使用,它对使用的照片的拍摄位置没有太高的要求,但是却能制作出专业级别的摄影测量数据,极大的提升了您3D建模过程中的使用体验。
此外,该软件也不需要相机效验,全自动化的生成体验可以让你感受到软件特有的强大功能,如果您正好从事设计相关专业并且从未尝试过这款软件带来的3D制作效果,那么这将是你必备工具中的不二选择。本站提供
PhotoScan Pro 破解版下载,提供32位、64位数据包和
破解补丁给您选择,不需要激活码即可无限制免费使用,有需求的用户欢迎前来下载使用。
安装教程
1、下载并解压安装包压缩包,得到32位、64位安装程序和32位、64位破解补丁,用户可以根据系统需求自行选择安装程序和破解补丁
2、小编电脑系统是64位,所以选择64位安装程序和64位破解补丁,接下来进行软件安装,双击运程序进行原程序安装,进入安装向导界面
3、勾选“I accept the terms in the license agreement”同意软件相关许可协议
4、按照默认设置即可
5、选择软件安装路径,可更改,也可按照默认路径,并根据用户需求选择是否勾选创建桌面快捷方式
6、一切准备就绪,点击“install”开始准备安装软件
7、软件进入安装状态,正在安装,安装过程需要一些时间,请大家耐心等待一下
8、软件安装完成,点击“finish”退出安装程序
破解教程
1、回到软件安装包,将破解补丁复制到软件安装路径下(其默认安装详细路径为C:Program FilesAgisoftPhotoScan Pro),复制完毕后,并覆盖替换原文件,选择“复制和替换”即可获取生成激活码破解软件
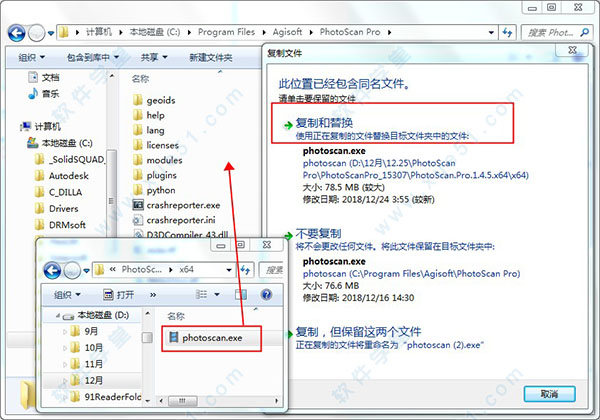
2、运行打开软件,查看软件相关信息,我们可以看到软件已经注册激活了,至此,软件成功破解,用户可以免费、无限制使用了
版本功能
1、摄影测量三角测量处理各种类型的图像:航空(低谷,斜)和近景。
自动校准:框架(包括。(鱼眼),球形和圆柱形照相机。
多摄像头项目支持。
2、密集点云:编辑与分类详细的模型编辑,以获得准确的结果。
点分类以自定义几何重构。
.LAS导出以受益于经典的点数据处理工作流。
3、数字高程模型:DSM/DTM输出数字地面和/或数字地形模型-取决于项目。
基于EXIF元数据/飞行日志的地球观测:GPS/GCPs数据。
EPSG登记册坐标系统支持:WGS 84、UTM等。
4、地质参考正交性出口地理参考正交:大多数-地理信息系统兼容GeoTIFF格式;.kml文件将位于谷歌地球。
用于大型项目的成批出口。
均匀纹理的颜色校正。
5、测量:距离、面积、体积内置的测量距离、面积和体积的工具。
为了执行更复杂的度量分析,产品可以顺利地转移到外部工具,这要归功于各种导出格式。
6、地面控制点:高精度测量GCPs导入控制结果的准确性。
编码/非编码目标自动检测快速GCPs输入。
标尺工具可设定基准距离,无需安装定位设备。
7、Python脚本:自定义处理工作流除了批量处理(这是一种节省人工干预的方法)之外,Python脚本还建议定制选项:
几个相似数据集的参数模板;中间处理结果检查;等等。
8、多光谱图像处理RGB/NIR/热/多光谱图像处理。
基于较好信道的快速重构。
用于内建植被指数(NDVI)计算和输出的多通道正交面的生成。
9、三维模型:生成和变形各种场景:考古遗址,文物,建筑,室内,人等。
直接上传Sketchfab资源并导出到各种流行格式。
照片真实感纹理:HDR和多文件支持。
10、4D建模:用于动态场景电影艺术、游戏等创作项目的多摄像机站数据处理。
根据大量的视觉效果与三维模型重建的时间序列。
软件中文设置
1、激活成功后,软件便可以使用,但是软件默认的语言是英文,点击“tool”—“preferences”

2、然后选择“chinese”,点击“OK”
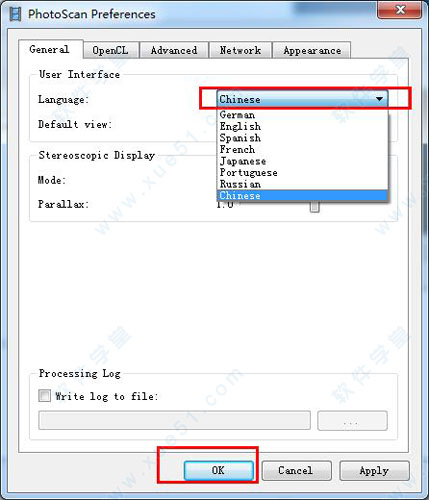
3、软件界面便可成为中文版界面,以后便可以使用PhotoScan中文破解版了
使用教程
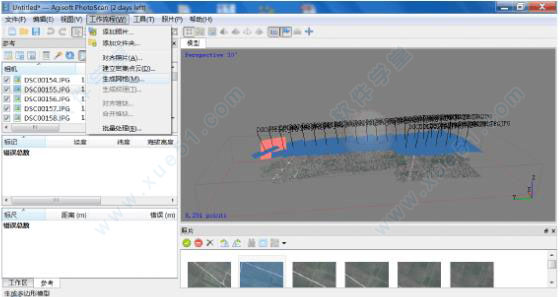
1、打开软件点击菜单栏“工作流程”,下拉菜单中有“添加照片”、“添加文件夹”选项,分别以选择照片和选择整个文件夹影像方式加入影像,如下图所示:

2、点击“添加照片”,出现如下图界面,可选择需要处理的影像
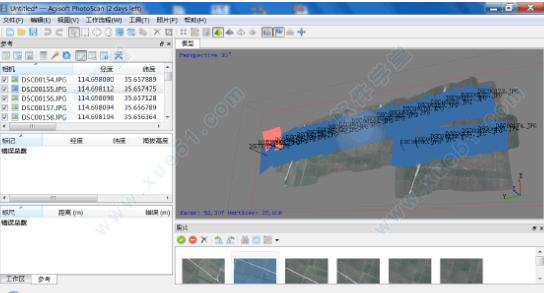
3、选择影像后,在左侧会出现影像名列表,软件下侧会显示影像缩略图

4、双击每个缩略图,主窗口显示该张影像的大图,可以查看影像
5、如果有POS数据,点击左侧窗口“参考”栏中第一个图表,导入POS数据,若没有POS数据可直接跳至步骤十一(POS数据为拍摄每张影像所对应的无人机位置、姿态参数,辅助拼接,拼接后的影像将具有地理坐标信息)
6、点击“导入”后,弹出POS导入窗口,如下图,选择整理好的POS文档即可
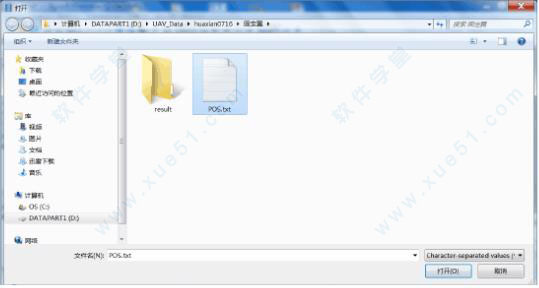
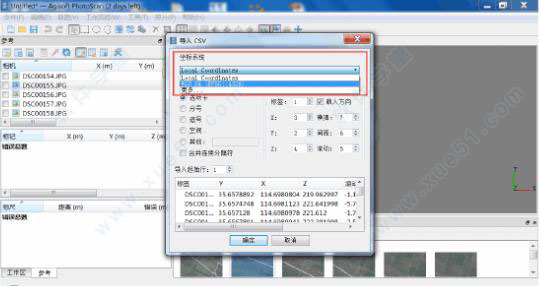
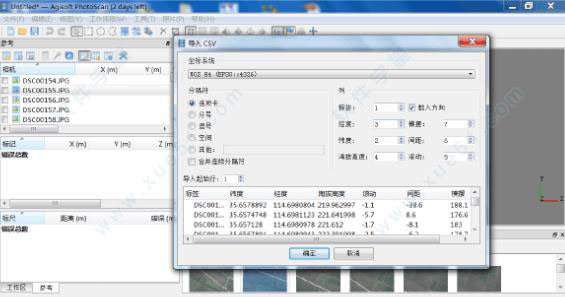
7、POS导入后,选择“WGS84”坐标系统,并将各列数据与表头名称对应
8、对应好的POS界面如下图所示:
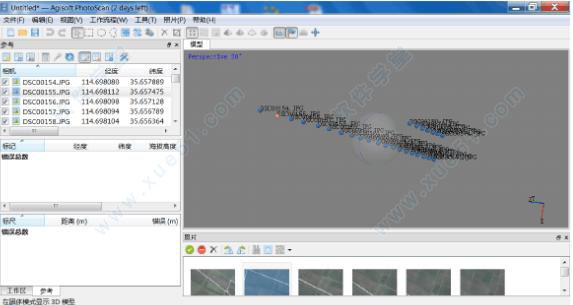
9、POS数据导入后,界面中将显示POS轨迹,即无人机拍摄照片时所处空间位置
10、点击“工作流程-对齐照片”
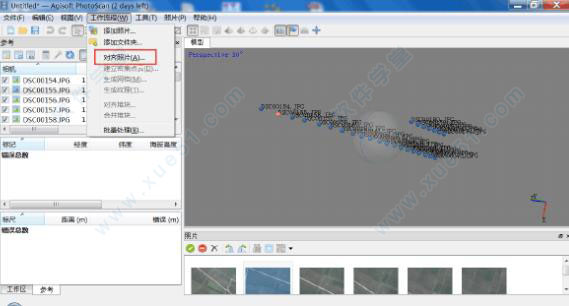
11、在弹出的对话框中,精度选择“高”,成对预选选择“参考”,点击确定
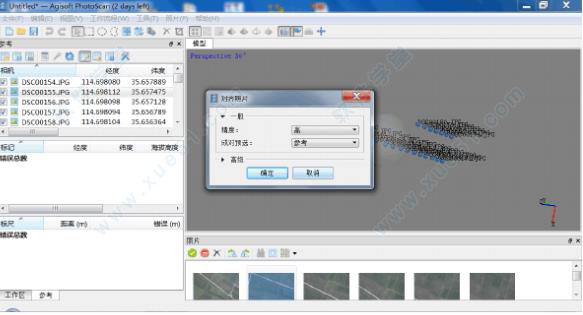
12、下图自动开始“对齐照片”处理,界面如下图,此过程只需等待,无需操作
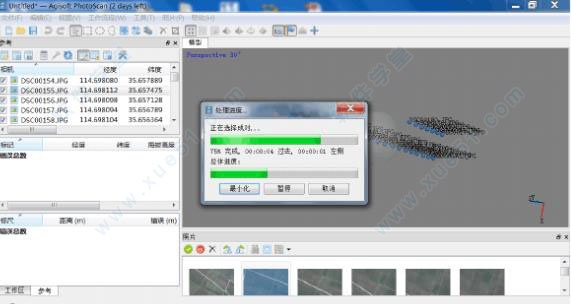
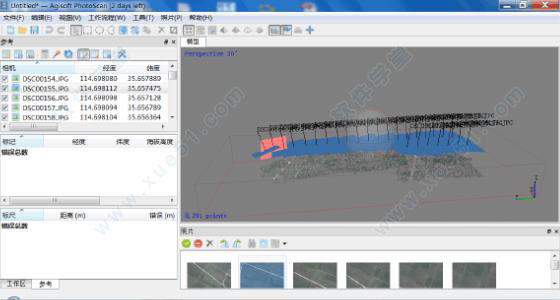
13、处理完成后,会生成三维点云数据,如下图所示:

14、“对齐照片”完成后,点击“工作流程-建立密集点云”

15、在弹出的对话框中,选择所需要的质量,如下图,质量设置越高,处理速度越慢
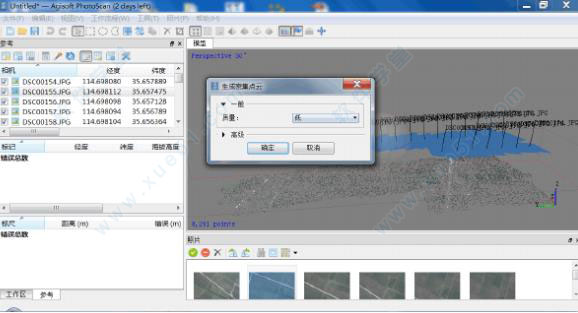
16、点击确定后,系统自动处理,并显示处理进度
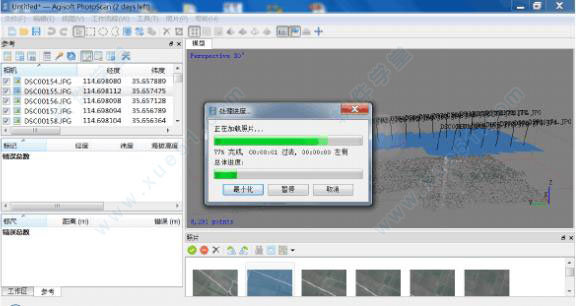
17、处理完成后,生成密集点云数据
18、选择“工作流程-生成网格”,如下图
19、在弹出的对话框中选择所需要的质量,点击确定,出现以下进度显示界面:
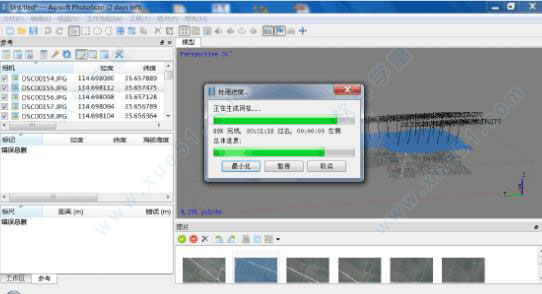
20、处理完成后,生成测区光滑曲面
21、点击“文件-导出正射影像-导出JPEG/TIFF/PNG”,导出拼接后影像
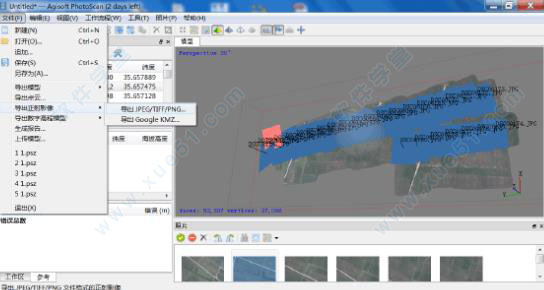
22、在弹出的界面中,直接默认设置即可,点击“导出”

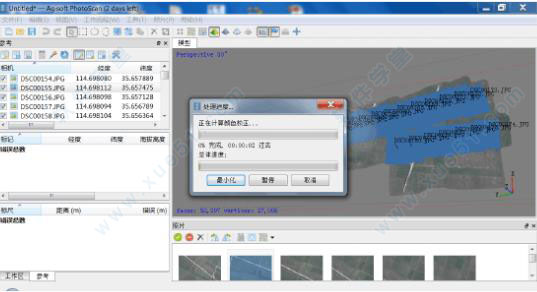
23、点击“导出”后,选择导出路径及导出文件名

24、点击确定后,开始导出,等待完成后,即可到相应路径下,查看拼接后正射影像
主要特色
1、空中和近景三角测量
2、点云生成(稀疏/密集)
3、多边形模型生成(普通/纹理)
4、设置坐标系
5、数字高程模型(DEM)生成
6、真正射光刻机
7、使用飞行日志和(或)GCPs进行地理参考
8、多光谱图像处理
9、动态场景的4D重建
10、Python脚本支持
点击星星用来评分