3DF Zephyr Aerial是一款特别好用的的照片转三维模型软件,这款软件不管是我们日常生活中,还是办公中都可能要上它,软件主要应用于允许您自动和容易地从照片中重建三维模型,这个过程是完全自动的。不需要编码目标、手工编辑或特殊设备。3df Zephyr是建立在我们的专利,尖端,重建技术之上。3DFZephyr提供了一个用户友好的界面,它可以导出许多常见的3D格式,甚至无需外部工具就可以生成高清视频。它是从现实出发建模的理想工具。能够运用相片主动重建三维模型,这个进程是彻底主动的,不需要编码,手动修改或专用设备。3DF Zephyr官方版是一个对计算机请求很苛刻的使用,由于它需要一切可用的CPU内核的优势,它利用了NVIDIA CUDA技能,如果有的话,请注意,启用CUDA显卡能够明显提高功能。本站提供
3DF Zephyr Aerial 中文破解版,内置破解文件,可以完美兼容32位和64位电脑版,有喜欢的朋友可以下载!
安装破解教程
1、下载数据包然后解压,双击“3DF+Zephyr+Aerial+v4.300+(x64).exe”点击确定
2、选择“我接受协议”点击下一步
3、点击“下一步”
4、点击“安装”
5、软件正在安装,请耐心等待
6、安装完成,关闭软件
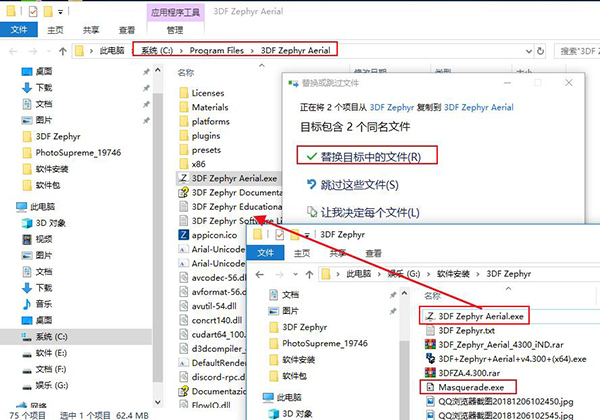
7、将数据包中提供的两个破解补丁复制到安装目录下替换源文件即可,一般默认安装目录为:C:\Program Files\3DF Zephyr Aerial
软件功能
1、改良技术
我们一直在推动研究和开发,最新版本也不例外,因为我们提高了我们最先进的摄影测量管道的每一个重建步骤的速度和精度。许多其他优化和新工具使Zephyr成为您信任的3D重建软件解决方案。
2、改进互操作性
Zephyr最近改进了对激光扫描技术的支持,改进了点云管理和构造工具。3df Zephyr仍然是一个完整的摄影测量软件包,可以从摄影测量和激光扫描世界中获得最好的结果。
3、随时准备生产
和往常一样,这个更新还包括许多新的工具和对我们的工作流程的改进。3DFZephyr是一套完整的摄影测量软件,快速可靠。
软件特色
1、从运动管道(所有版本)更快的全局结构 – 运动重建引擎的结构已更新,提供更快速*的稀疏点云重建
2、网格photoconsistent优化(所有版本) – 提取更多的细节重建网格时
3、激光扫描格式支持与全局束调整扫描对齐 – 从Faro的.fls和.fws文件格式开始,您将能够直接在3DF Zephyr Pro 3.0(所有版本)中查看这些本机格式,甚至导入它们作为非结构化对象在您的工作区Pro和航拍)
4、手动和自动折线提取(仅限空中) – 快速,轻松地生成绘图元素(并以.dxf格式导出),无论是手动绘制图片还是让Zephyr为您完成工作
5、多ICP注册(Pro和航空只) – 自动和容易地注册您的点云扫描内的Zephyr与多ICP注册算法。您可以直接在Zephyr和v3.0内部对激光扫描点云进行彩色化,使得此过程更加容易,并允许您在已经生成摄影测量点云的情况下制作任何点云结构:完成后,您还可以使用任何其他工具那些结构化点云,如网格生成,轮廓线生成,以及3DF Zephyr Pro 3.0可以提供的一切。
使用教程
要创建一个新项目,只需点击工作流>新项目(1)。项目向导(3)屏幕将出现,这将指导您通过导入图片的过程。
对于标准工作流程,只需点击下一个按钮,然后在软件中添加照片即可。
但是,在该向导中有两个子菜单称为导入(3)和附加选项(4)。
在导入菜单中有两个选项:
进口控制点的限制:3DF ZePHR不需要任何预校准文件;不管怎样,如果你有自己的设备创建的校准文件,你可以通过选择这个选项来加载校准文件。点击下一个按钮,你会发现另一个子菜单,你可以选择:
-手动输入每个内部和外部参数(对于每个图像);
-指定位置和欧拉角;
-使用文本文件导入内部和外部参数;
输入相机位置限制:作为前一个选项,这个选项允许您在3DF ZePHR中输入相机位置(通过加载TXT文件)并使用它们来约束3D重建;该条目的实际使用的标准示例由无人机或UA拍摄的图片表示。V系统记录记录GPS坐标的射入EXIF数据。
在附加选项子菜单(4)中,您可以指定软件来执行四个三维重建阶段中的每一个,而不在一个阶段和另一个阶段之间停止;当您没有足够的时间来详细设置3D重建时,该工具会非常有用。这种技术被称为批处理,并且只推荐给高级用户,因为它代表了3DF ZePHR中自动化的最高水平。
在附加选项(4)中,在线计算预先计算的相机校准选项允许将相机校准参数保存在3DF ZePHR在线数据库上,以便软件能够自动获得提供精确校准参数和减少结构时序的信息。从运动阶段开始,当摄像机再次被利用时。
在前一个子菜单中,如果这些图片以前是用3DF伪装工具生成的,则还可以加载与照片相关的掩码。点击下一步,将出现掩蔽页面(见上面的图像),它将指定掩码是否已正确加载到3DF ZePHR(绿色OK应该靠近图片的名称,对于每个导入的掩码)或不。
通过选择方向选项中的忽略掩蔽,3DF ZePHR将仅在生成稠密点云时利用掩模;如果图像背景纹理良好,因此该工具是有用的,因此可以帮助相机的第一相位定向。
下一个窗口是照片选择页,其中用户被要求加载图片。可以将“n”拖动到窗口中,或者单击“添加”(5)来选择照片目录。从3DF版本3.1开始,ZePHR用户也被允许添加和处理原始文件,例如:
NEF
-CR2
-ARW2
-ORF
3DF ZePHR允许你从视频图像按钮(6)中导入图像和视频,这个工具可以在最后被视为照片的帧中分割视频。
在加载窗口中,可以选择所需的文件,然后指定将保存所提取的帧集合的目标文件夹。在下面的选项中,可以设置要提取的帧速率(FPS)、每个帧上的模糊分析和相似帧的识别阈值和拒绝。
若要开始提取,只需单击提取框并在工作区中导入(7)。
在加载图像或视频文件并点击Next按钮后,您将看到摄像机校准页面,在那里您可以看到每个进口图像的列表以及3DF ZePHR将用于每个相机及其ExIF数据的校准。
通过鼠标右键点击,你可以选择或取消选择所有图像,并克隆校准。
从这个页面,您可以添加一个新的校准(8),或修改校准(9),3DF ZePHR已经自动识别了照片的EXIF数据。
在“修改校准”页中,可以选择要更改的焦点长度(如果加载的图片已被使用不同焦距),然后定义校准参数。
通过从文件按钮导入参数,您可以加载已经用外部应用程序创建的校准文件(见Labyx 3DF)。
提示:如果你有用广角或鱼眼镜头拍摄的进口图片,建议激活调整切向失真参数选项(10)。
一旦完成了校准步骤,就必须通过摄像机定向设置页面设置3D重建的第一阶段,这将生成稀疏PO。
更新日志
v4.300
1.新锐特点网格生成算法(3DF Sasha)
2.在密集的点云计算提高速度
3.在密集的点云计算的几个精度提高
4.SFM在提高速度
5.在SFM精度提高
6.新的色彩平衡算法
7.捆绑的调整可以在GCP对准被触发。
8.添加的对象剪切/复制对象
9.添加筛网过滤器(致密化,抽取,平滑,补洞)
10.添加PNG / JPG面具支持
11.添加的点云/网格导入到工作区
12.新增PDF 3D,U3D,DXF和COLLADA支持
13.新工具:计算量
14.新工具:计算网格地区
15.新工具:其他捆绑调整步骤
16.新工具:角度测量
17.新工具:改变工作空间的照片
18.新工具:信心直方图
19.3DF阳光支持(云计算的Web服务,现在处于测试阶段)
点击星星用来评分